runctrl — Run control#
This module provides all the basic facilities to control the data acquisition at an abstract level.
The finite-state machine#
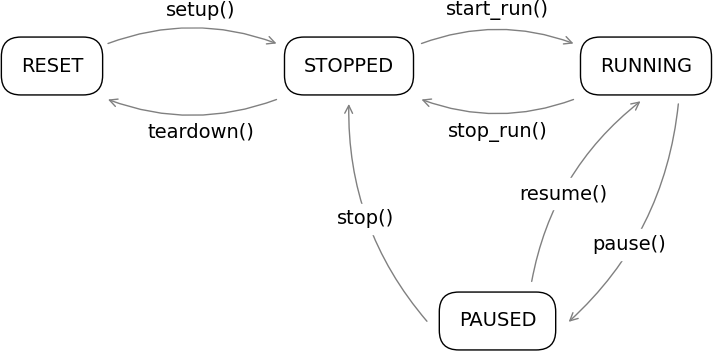
The FiniteStateMachineLogic class
represents the basic logic of a finite-state machine (FSM) with four states, defined in
the FsmState enum class
(RESET, STOPPED, RUNNING and PAUSED).
This is an abstract class, and subclasses are ultimately responsible for
re-implementing all the virtual methods, i.e.,
setup(), called in theRESET->STOPPEDtransition;teardown(), called in theSTOPPED->RESETtransition;start_run(), called in theSTOPPED->RUNNINGtransition;stop_run(), called in theRUNNING->STOPPEDtransition;pause(), called in theRUNNING->PAUSEDtransition;resume(), called in thePAUSED->RUNNINGtransition;stop(), called in thePAUSED->STOPPEDtransition.
These virtual methods are actually never called directly, and all the interactions with concrete instances of subclasses typically happen through four methods, mapping to the typical buttons of a transport bar, that call the proper hook to set the FSM in a given state, depending on the current state:
set_reset();set_stopped();set_running();set_paused().
This assume that the target state can be reached via a valid transition from the
current state, and if that is not the case, an
InvalidFsmTransitionError
error is raised.
The FiniteStateMachineBase class
is a subclass of FiniteStateMachineLogic
that, in addition to all the functionality of the base class, emits a
state_changed (FsmState)
signal whenever the underlying state changes, signaling the state after the transition.
This is still an abstract class, and subclasses are ultimately responsible for
re-implementing all the relevant virtual methods.
The run control#
The RunControlBase class is a
subclass of FiniteStateMachineBase
and, on top of the base class, is adding all the logic for controlling the data
acquisition, including:
the (coarse, that is, at the wall clock level) time keeping;
the I/O, including the management and location of configuration files, log files, and actual data files;
the book-keeping of the basic run statistics, and its synchronization with the control GUI, when relevant;
the execution of custom user applications, which is where the actual semantic of the data acquisition is implemented.
See also
RunControlBase is still an abstract
class that cannot be instantiated directly. Subclasses must, at the very minimum,
define the _PROJECT_NAME class attribute, and a minimal working example of a
concrete run control will look like:
class MyRunControl:
_PROJECT_NAME = 'my_project'
Any run control object is equipped to emit the following signals:
run_id_changed(intrun_id) is emitted whenever the run ID is changed, that is, at the beginning of each run;user_application_loaded(UserApplicationBaseuser_app) is emitted whenever a user application is loaded (and the full application object is passed along with the signal);uptime_updated(floatuptime) is emitted whenever the uptime for the run control is updated;event_handler_stats_updated(intnum_packets_processed, intnum_packets_written, intnum_bytes_written, floataverage_event_rate) is emitted whenever the event handler provides updates for the underlying statistics.
See also
Basics: test-stand and run ID#
At the very basic levels there are two quantities that are central to the state of the run control at any given time:
the test-stand ID is an integer number identifying the test equipment being used for the data taking;
the run ID is another integer number uniquely identifying a given portion of data taking, done for a specific purpose, through which the test configuration stays rigorously unchanged.
The test-stand ID and the run ID are read from the proper configuration files when the run control is instantiated, and the run ID is incremented by one unit each time the run control is started—this is really all that there is to know.
Warning
Default configuration files for both the test-stand and the run ID will be automatically created for you when a run control is instantiated if they don’t exist. While this is likely what you want for the run ID, the responsibility of keeping track of the test-stand ID is entirely on you, and you will want to edit the file by hand as needed.
I/O and file locations#
The basic rules for the location of the files managed by the run control are
determined by the _PROJECT_NAME class attribute, and they boil down to:
configuration files (e.g.,
test_stand.cfgandrun.cfg) live in$HOME/.baldaquin/_PROJECT_NAME;all run-specific data products (that is, data files and log files) are saved in
$BALDAQUIN_DATA/_PROJECT_NAMEif the$BALDAQUIN_DATAenvironmental variable is defined, and in$HOME/baldaquindata/_PROJECT_NAMEotherwise—more specifically, a self-contained folder named after the test-stand and run ID is created there every time a run is started;user applications provide their own semantics to control the location of the relevant configuration files, but the latter are typically located in
$HOME/.baldaquin/_PROJECT_NAME/apps.
Loading a user application#
Although in real life the run control will typically be controlled by a graphical user interface, the basic semantic for starting a data acquisition programmatically, with a given run control and user application, reads:
run_control = MyRunControl()
user_app = MyUserApplication()
run_control.load_user_application(user_application)
run_control.set_running()
See also
Note that the run control will emit an AppNotLoadedError
exception upon any attempt to change the underlying state of the FSM without
an actual user application being properly loaded.